1.4: Rotation Matrices and Orthogonal Matrices
- Jeffrey R. Chasnov
- Hong Kong University of Science and Technology
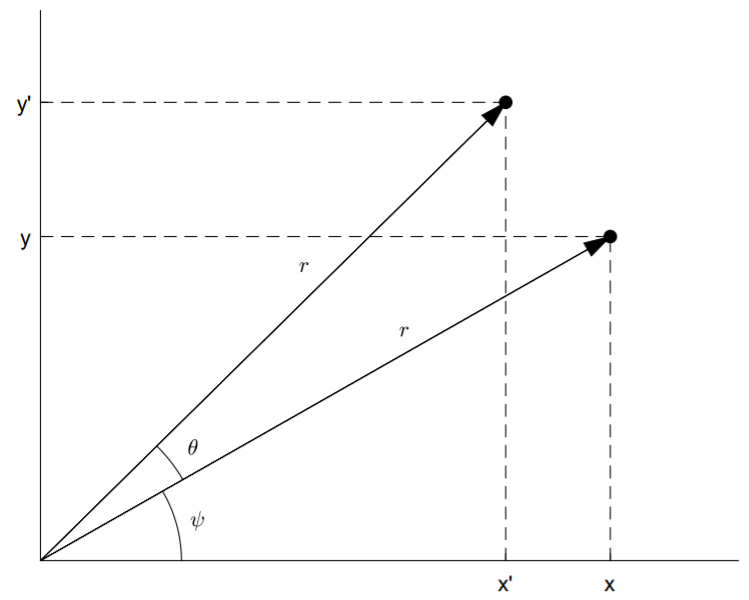
View Rotation Matrix on YouTube View Orthogonal Matrices on YouTube Consider the two-by-two rotation matrix that rotates a vector through an angle \(θ\) in the \(x\)-\(y\) plane, shown above. Trigonometry and the addition formula for cosine and sine results in \[\begin x'&=r\cos(\theta+\psi) \\ &=r(\cos\theta\cos\psi -\sin\theta\sin\psi )\\&=x\cos\theta-y\sin\theta \\ y'&=r\sin(\theta+\psi)\\&=r(\sin\theta\cos\psi+\cos\theta\sin\psi) \\ &=x\sin\theta+y\cos\theta.\end \nonumber \] Writing the equations for \(x'\) and \(y'\) in matrix form, we have \[\left(\beginx'\\y'\end\right)=\left(\begin\cos\theta&-\sin\theta \\ \sin\theta&\cos\theta\end\right)\left(\beginx\\y\end\right).\nonumber \] The above two-by-two matrix is called a rotation matrix and is given by \[\text_\theta =\left(\begin\cos\theta&-\sin\theta \\ \sin\theta&\cos\theta\end\right).\nonumber \]
Example \(\PageIndex\)
Find the inverse of the rotation matrix \(\text_\theta\). Solution The inverse of \(\text_θ\) rotates a vector clockwise by \(θ\). To find \(\text^_θ\), we need only change \(θ → −θ\): \[\text_\theta^=\text_=\left(\begin\cos\theta&\sin\theta \\ -\sin\theta&\cos\theta\end\right).\nonumber \] This result agrees with (1.4.4) since \(\det\text< R>_\theta =1\).
Notice that \(\text^_θ = \text^>_θ\). In general, a square \(n\)-by-\(n\) matrix \(\text\) with real entries that satisfies \[\text^=\text^>\nonumber \] is called an orthogonal matrix. Since \(\text^> = \text\) and \(\text^>\text = \text\), and since \(\text^>\) multiplies the rows of \(\text\) against themselves, and \(\text^>\text\) multiplies the columns of \(\text\) against themselves, both the rows of \(\text\) and the columns of \(\text\) must form an orthonormal set of vectors (normalized and mutually orthogonal). For example, the column vectors of \(\text\), given by \[\left(\begin\cos\theta \\ \sin\theta\end\right),\quad\left(\begin-\sin\theta \\ \cos\theta\end\right),\nonumber \] are orthonormal. It is clear that rotating a vector around the origin doesn’t change its length. More generally, orthogonal matrices preserve inner products. To prove, let \(\text\) be an orthogonal matrix and \(x\) a column vector. Then \[(\text)^>(\text)=\text^>\text^>\text=\text^>\text.\nonumber \] The complex matrix analogue of an orthogonal matrix is a unitary matrix \(\text\). Here, the relationship is \[\text^=\text^\dagger .\nonumber \] Like Hermitian matrices, unitary matrices also play a fundamental role in quantum physics.
This page titled 1.4: Rotation Matrices and Orthogonal Matrices is shared under a CC BY 3.0 license and was authored, remixed, and/or curated by Jeffrey R. Chasnov via source content that was edited to the style and standards of the LibreTexts platform.
- Back to top
- 1.3: The Identity Matrix and the Zero Matrix
- 1.6: Matrix Representation of Complex Numbers
- Was this article helpful?
- Yes
- No
Recommended articles
- Article type Section or Page Author Jeffrey R. Chasnov License CC BY License Version 3.0 Show Page TOC no
- Tags
- orthogonal matrix
- rotation matrix
- source@https://www.math.hkust.edu.hk/~machas/applied-linear-algebra-and-differential-equations.pdf
- unitary matrix
